一开始自己死命的去网上找现成的代码,但是发现大多都是打着dmp的幌子,给的是得出原始数据的代码,或者确实是dmp的代码,但是太复杂,自己看不懂,所以果断放弃,直接去网上找dmp移植的教程,结果文字教材也是...
”dmp 移植“ 的搜索结果
STM32 HAL库移植MPU6050 DMP库。
我们总结一下在库文件中都做了那些修改:把#include "stm32f4xx.h"修改为 #include "stm32f10x.h"1删除 #include "main.h" 和 #include "board-st_discovery.h" 头文件声明1修改 #include "uart.h" 为自己写的 #...

MPU6050模块是什么东西,我这里就不再赘述了,围绕它可以做很多应用,比如四翼飞行器、平衡车等等。当然要完全使用这块模块不是那么... 另一种是直接用MPU6050内部的自带的数字运动处理器(即DMP),我们要用这个DMP
手把手教你移植DMP
标签: DMP
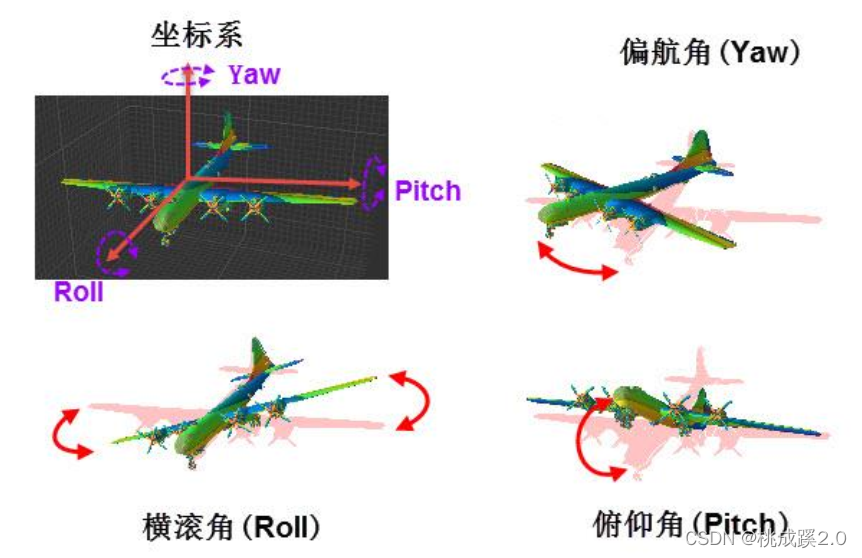
InvenSense 提供了一个MPU6050 的嵌入式运动驱动库, 结合MPU6050 的DMP, 可以将我们的原始数据,直接转换成四元数输出,而得到四元数之 后,就可以很方便的计算出欧拉角,从而得到yaw、roll 和pitch。

实现MPU6050DMP数据读取功能,通过四元数计算出倾角值和角度值
基于stm32的DMP移植教程。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...

Stm32f103c8t6最小核心板控制一个MPU6050姿态传感器在串口调试助手输出三个姿态角(Pitch/Roll/Yaw)的C语言代码(为官网DMP移植好的工程,接线即可使用,内附串口调试助手及引脚接线方法)
基于STM32+MPU6050移植的文件,包括详细的移植步骤
DMP得到姿态角俯仰,翻转,偏航的角度。直接在水平方向测试通过。
DMP移植成功
STM32F407MPU6050驱动,移植DMP库,可以输出欧拉角!!
dmp代码移植 可更加节省单片机资源 加快结算速度
MPU6050陀螺仪加速度计使用非常的普遍,大多数人都是使用的卡尔曼滤波得到...下面我就大概讲解一下将官方的dmp文件移植到自己的代码中。1.移植大概主要包含这几个函数如果正常使用的话的加这几个函数2.把inv_mpu函数...
MPU6050 STM32-DMP移植 STM32程序
此资源是本人通过将官方的dmp库从msp430平台移植到stm32f1 hal库平台的代码,已经成功驱动了mpu6050的dmp,成功获取到四元数和ptich,roll,yaw三个欧拉角。 使用过程有什么问题可以私信问我。
MPU6050 DPM移植到Air724/Air800 Lua语言 MPU6050 MPU6050是一个三轴加速度+三轴陀螺仪的六轴传感器,自带DMP数字运动处理器,可以减少MCU复杂的融合演算数据、感测器同步化、姿态感应等负荷。 MPU6050网上的学习...
nrf_51822_mpu6050_DMP移植好的,验证可用,使用官方库,更改量小
官方DMP库不得不说是对姿态融合新手的是一个福音,什么也不用管,只需要移植好就可以得到四元函数,然后官方库中给的demo中有将四元函数转化成欧拉角的函数,可以说可以完完全全绕开这个麻烦的姿态融合,毕竟不是我...
移植他人MPU9250代码时出现错误
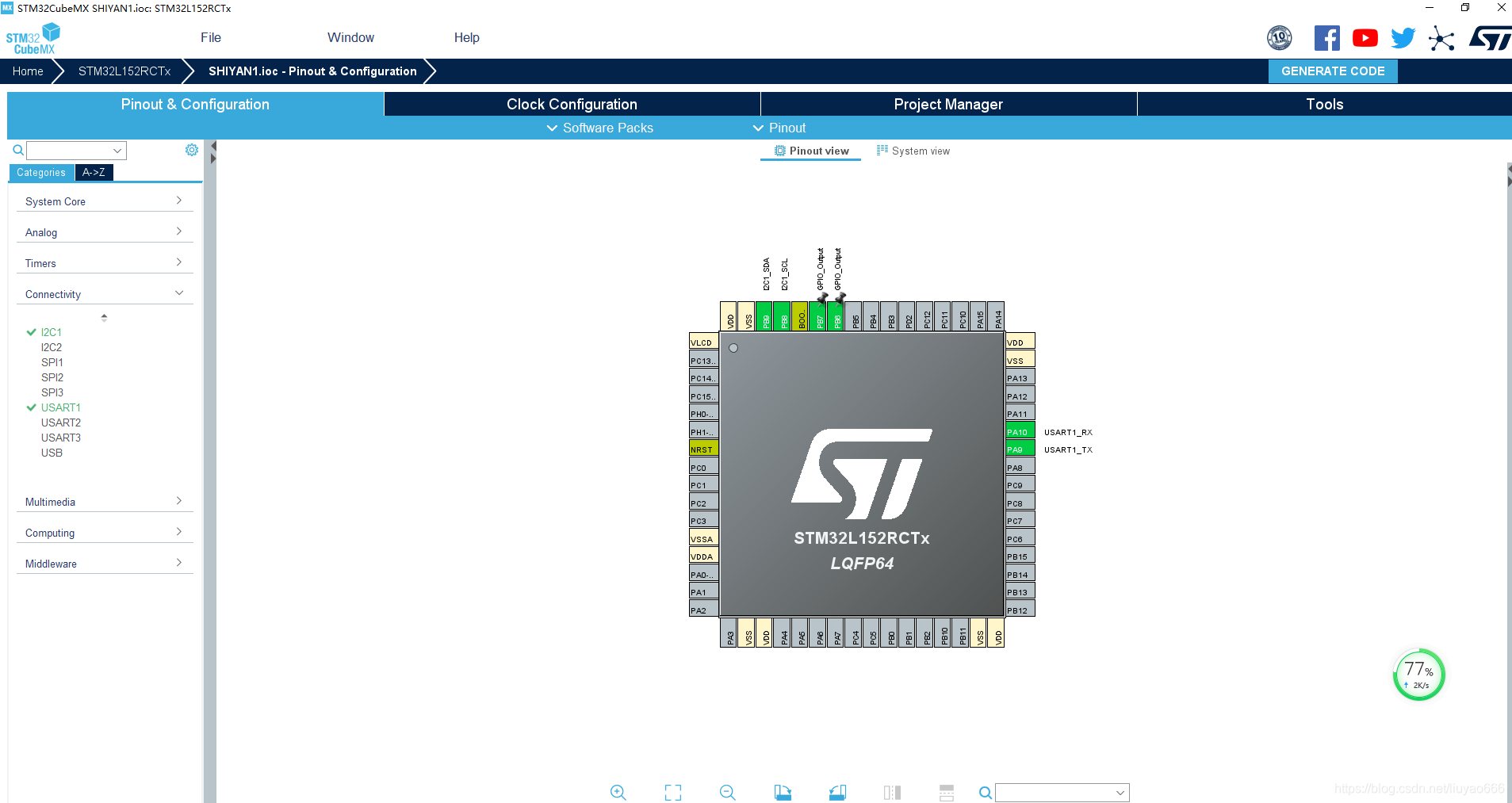
对于将 MPU6050DMP 移植到 STM32HAL 库,你可以按照以下步骤进行操作: 1. 首先,确保你已经正确连接了 MPU6050 模块到 STM32 开发板上。通常情况下,你需要连接 SDA、SCL、VCC 和 GND 引脚。 2. 在 STM32CubeMX ...
移植DMP需要以下步骤: 1. 配置硬件接口:根据mpu6050的引脚定义和连接方式,将其连接到目标平台的对应引脚上。 2. 配置I2C通信:mpu6050通过I2C协议与主控器进行通信,需要配置I2C接口并实现相应的读写函数。 3. ...
提取码:3210 源移植文件来自b站“中Left10”up主的,他的b站有视频讲解。上面链接是在源文件上做了微改 目录一、复制移植文件到工程里面(江科大的工程模板) 0、解压文件后我们得到3个文件夹。(就称这里为路径1好...
对于将STM32MP系列处理器移植到特定平台,您需要遵循以下步骤: 1. 了解目标平台:了解目标平台的硬件配置和特性,包括处理器类型、外设、内存布局等。这有助于您确定在移植过程中需要关注的关键因素。 2. 准备...
stm32f1对mpu6050和9250的姿态解算,采用DMP直接解算成角度,亲测可用,不动的情况下角度基本保持不变
推荐文章
- android多级树形列表-程序员宅基地
- 《成为一名机器学习工程师》_成为机器学习的拉斐尔·纳达尔-程序员宅基地
- Debian11-jenkins+python+allure自动化搭建_debian11 源 tencent-程序员宅基地
- JavaScript设计模式系统讲解与应用-笔记_javascript 设计模式系统讲解与应用 课程-程序员宅基地
- sepl 3.0,全方位全能型计算机语言_sepl无人编程-程序员宅基地
- java comtext_Java中的上下文对象设计模式(Context Object Design Pattern)-程序员宅基地
- lldp中与snmp相关内容agentx-程序员宅基地
- 关闭Mysql的root用户远程访问授权报错Duplicate entry localhost-root for key PRIMARY_error 1062 (23000): duplicate entry 'localhost-roo-程序员宅基地
- LeetCode 818. Race Car-程序员宅基地
- 信息检索笔记-索引构建_为某一文档及集构件词项索引时,可使用哪些索引构建方法-程序员宅基地